
Чем отличается синхронный двигатель от асинхронного?
В асинхронном двигателе ротор движется «сам по себе». В нем изначально нет ни магнитного поля, на него не подается никакого электрического напряжения. Он даже не обязан быть сделанным из железа — магнитного металла. Ну а вот, поди ж ты, стоит подключить к двигателю трехфазное напряжение, и ротор закрутился. Безо всякого подталкивания. Но по-своему.
Два вида электродвигателей переменного тока
Асинхронные двигатели — наивная простота
Ротор то догоняет волну, то слегка отстает, потому что синхронно с ней бежать просто не может.
Такое явление назвали «скольжением», догнав бегущее магнитное поле, ротор с беличьей клеткой теряет магнитную индукцию и дальше некоторое время просто скользит по инерции.
А когда трение или нагрузка вынуждают его отстать от бегущего поля, он опять «почувствует» в себе изменения силовых линий обгоняющего его поля и снова обретет индукцию, а вместе с этим и силы двигаться.
Асинхронные двигатели
То есть, ротор слегка проскальзывает: то догоняет бегущее равномерно по кругу магнитное поле, то «забывает, зачем бежал» и слегка приотстает, то снова «спохватывается» и опять стремится догнать.
Постепенно эти отклонения стабилизируются — в зависимости от трения в подшипниках и величины нагрузки на вал — и асинхронный двигатель начинает работать просто со скоростью вращения, чуть меньшей частоты напряжения на статоре.
Эта разница частот и называется частотой скольжения.
Двигатели синхронные: сложное в простом
Для того, чтобы ротор был связан с бегущей волной магнитного поля катушек статора жестким образом, придумали электродвигатель синхронный. А проблема решается просто. В роторе вместо изменяющегося магнитного поля от короткозамкнутых токов беличьей клетки нужно использовать постоянные магниты и их магнитное поле.
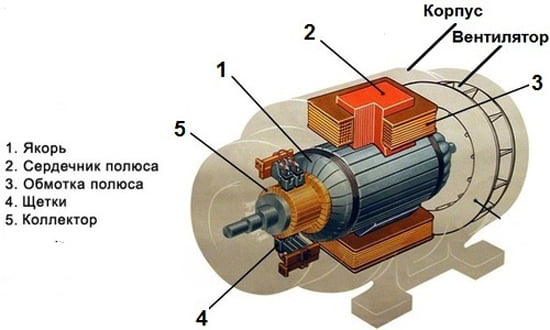
Устройство двигателя
Вариантов два. Или это поле от постоянного магнита, закрепленного в роторе, или это поле от электромагнитов, установленных в роторе вместо такого магнита.
Обычный магнит, конечно, проще. Но тогда для стандартного функционирования таких электромоторов нужно, чтобы на них на всех — а используются тысячи электромоторов — магниты были строго одинаковы. Иначе параметры движения будут разными, а магниты еще имеют свойство размагничиваться.
Электромагнит, установленный в роторе двигателя, легче заставить вырабатывать поле нужного качества, но требуется электрический ток для его работы. Такой ток, который называется током возбуждения, в свою очередь нужно где-то брать и как-то на ротор подавать.
Синхронный электродвигатель (или генератор)
1 — ротор,
2 — коллектор возбуждения
Отсюда и происходит некоторое разнообразие конструкций синхронных двигателей. Но важнее всего то, что синхронные двигатели крутят свой вал строго синхронно частоте бегающего по кругу поля катушек статора, то есть скорость их вращения точно равна — или кратна (если обмоток статора больше трех) — частоте переменного тока в питающей сети.
Однако кроме всего прочего, синхронный двигатель обладает свойством полной обратимости. Потому что синхронный электродвигатель — это тот же самый генератор электрического тока, но работающий «в обратную сторону».
В генераторе некоторая механическая сила вращает вал с ротором, и от этого в обмотках статора возникает наведенное электрическое напряжение от вращающегося магнитного поля ротора.
А отличие синхронного двигателя от генератора в том, что напряжение в катушках статора порождает бегающее по кругу магнитное поле, которое, взаимодействуя с постоянным магнитным полем ротора, толкает его, чтобы ротор тоже вращался.
Только если в генераторе вращению ротора можно механически придать любую скорость, и от этого будет изменяться частота переменного тока, им генерируемого, то в синхронном двигателе такой роскоши нет. Синхронный двигатель вращается со скоростью изменения напряжения в сети, а оно у нас выдерживается строго в 50 герц.
Отличия и недостатки этих двигателей
Отличия синхронного и асинхронного двигателей ясны из их названий. Собственно, плюсы имеют и тот, и другой вариант конструкции. Ниже перечислены плюсы, которыми отличаются оба двигателя — синхронный и асинхронный.
Синахронный и асинхронный двигатели
Асинхронный двигатель отличается от синхронного следующими параметрами:
- простота конструкции и невысокая стоимость;
- нет скользящих контактов, надежность в эксплуатации;
- напряжение прикладывается к неподвижным катушкам статора;
- ротор очень прост по конструкции;
- при запуске и разгоне постепенно наращивает мощность;
- возможность реверсировать направление вращения, просто поменяв местами две питающих фазы;
- при остановке движения (слишком большая механическая нагрузка на вал ротора) никакой аварии не происходит, может произойти перегрев беличьей клетки.
Отличия синхронного двигателя от асинхронного заключаются в следующем:
- стабильная скорость вращения вне зависимости от нагрузки на вал;
- невысокая чувствительность к перепадам напряжения в сети;
- при уменьшении механической нагрузки способен по инерции работать как генератор, не забирая энергию, а отдавая ее в сеть;
- высокий КПД;
- способен компенсировать реактивную мощность сети.
Но у каждого имеются и присущие только ему недостатки.
Асинхронный имеет следующие отрицательные черты:
- трудность регулировки частоты вращения;
- невысокая частота вращения;
- зависимость отставания частоты вращения от нагрузки на ось;
- при работе ротор нагревается за счет короткозамкнутых токов — требуется дополнительное охлаждение.
Недостатки синхронного двигателя:
- сложнее по конструкции;
- в некоторых конструкциях для проводки тока возбуждения в обмотки ротора используется коллектор, как в двигателе постоянного тока;
- труднее запускается.
Различные модели двигателей
Несмотря на различия, оба электрических двигателя нашли себе применение в технике и используются в самых разных исполнениях и размерах.
Источник: https://domelectrik.ru/oborudovanie/dvigatel/otlichiya-sinhronnyh-i-asinhronnyh-mashin
Чем отличается синхронный двигатель от асинхронного
Промышленные электродвигатели классифицируются по разным параметрам. Одной из определяющих характеристик является принцип работы. Так, различают синхронный и асинхронный двигатели. В чем же разница между ними?
Синхронный двигатель способен работать, одновременно совмещая функции двигателя и генератора. Его характерной особенностью является неизменяемая частота роторного вращения от нагрузки. Синхронные двигатели применяются в различных сферах.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитных полей индукторных полюсов. Как правило, якорь находится в статоре, а индуктор располагается в роторе.
Для моторов повышенной мощности устанавливаются электрические магниты для полюсов, а для маломощных — постоянные. На короткое время принцип работы синхронного двигателя включает в себя и асинхронный режим, используемый для разгона до номинальной скорости вращения.
В это время индукторные обмотки замыкаются накоротко или посредством реостата. По достижении необходимой скорости индуктор начинают питать постоянным током.
К недостаткам синхронных двигателей относят необходимость питания обмотки постоянным током, сложность запуска и скользящий контакт. Однако, несмотря на это, большинство генераторов, применяемых в различных промышленных областях, являются синхронными. К преимуществам таких двигателей относят высокую надежность, большой коэффициент полезного действия, простоту обслуживания.
Асинхронный двигатель — это механизм, трансформирующий электрическую энергию переменного тока в механическую. Частота вращения магнитного поля статора у таких устройств выше роторной.
Асинхронный двигатель состоит из статора цилиндрической формы и ротора. Он работает на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе.
Вращающий момент появляется тогда, когда имеется разность частоты вращения полей.
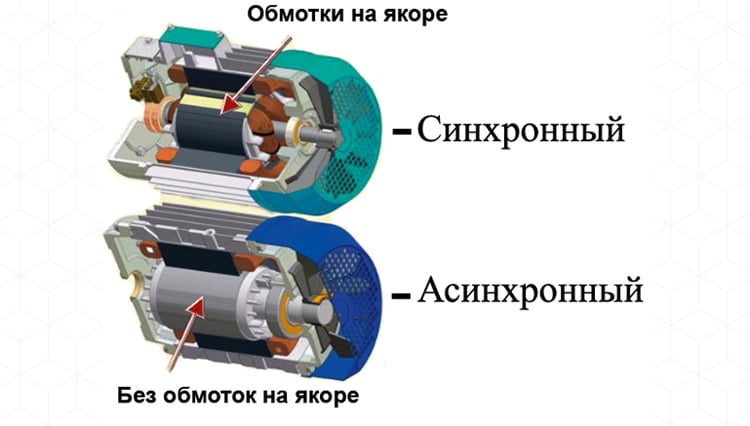
Таким образом, ключевое отличие синхронного и асинхронного двигателей — в роторе. У синхронного типа он заключается в постоянном или электрическом магните, асинхронные двигатели короткозамкнутые.
Основным недостатком асинхронных двигателей является трудность регулировки частоты вращения. Для реверсирования трехфазного асинхронного двигателя приходится изменять расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
В синхронном двигателе частота вращения является постоянной, в отличие от асинхронного. Поэтому первый применяют в областях, где необходима постоянная скорость и полная управляемость, к примеру, в насосах, вентиляторах и компрессорах.
Выводы:
- Синхронный двигатель способен работать, одновременно совмещая функции двигателя и генератора.
- Синхронные двигатели являются более современными, чем асинхронные.
- Синхронные двигатели имеют более высокий КПД, чем асинхронные.
- Ключевое отличие синхронного и асинхронного двигателей — в роторе.
- В синхронном двигателе частота вращения является постоянной, в отличие от асинхронного.
- Асинхронные двигатели труднее регулируются.
Источник: https://thedb.ru/items/Chem-otlichaetsja-sinhronnyj-dvigatel-ot-asinhronnogo/
Синхронный и асинхронный двигатель
Существуют различные виды электродвигателей, и очень часто возникает вопрос, в чем же отличия между синхронным и асинхронным двигателем.
В асинхронном обмотки, расположенные в статоре, создают вращающееся магнитное поле, взаимодействующее с токами, образующимися в роторе, благодаря чему он приходит во вращающееся состояние.
Поэтому, в настоящее время, наиболее популярным считается простой и надежный асинхронный электродвигатель, имеющий короткозамкнутый ротор.
Асинхронный двигатель
В его пазах расположены токопроводящие стержни из алюминия или меди, соединенные своими концами с кольцами из такого же материала, которые производят короткое замыкание этих стержней. Поэтому, ротор и называется короткозамкнутым.
Вихревые токи, взаимодействующие с полем, вызывают вращение ротора со скоростью, меньшей, чем скорость вращения самого поля. Таким образом, весь двигатель получил название асинхронного.
Это движение получило название относительного скольжения, поскольку скорости ротора и магнитного поля неравны и магнитное поле не пересекается с токопроводящими стержнями ротора. Поэтому, они не создают вращающийся момент.
Принципиальным отличием обоих видов двигателей является исполнение ротора. В синхронном он представляет собой постоянный магнит относительно небольшой мощности или такой же электромагнит.
Вращающийся магнит, создающий магнитное поле статора, приводит в движение магнитный ротор. Скорость движения статора и ротора, в этом случае, одинаковая.
Поэтому, данный двигатель получил название синхронного.
Особенности синхронного двигателя
Синхронный двигатель отличается возможностью значительного опережения током напряжения по фазе. Повышая коэффициент мощности по типу конденсаторных батарей.
Асинхронные электродвигатели отличаются простотой конструкции и надежностью в эксплуатации. Единственный недостаток этих агрегатов заключается в достаточной трудности регулировки частоты их вращения.
Трехфазные асинхронные двигатели могут быть легко реверсированы, то есть вращение двигателя может измениться на противоположное направление. Для этого, достаточно изменить место расположения двух линейных проводов или фаз, которые замыкаются на обмотку статора.
В отличие от синхронного, это простой и дешевый двигатель, применяющийся повсеместно.
Синхронный и асинхронный двигатель имеет еще и такое важное отличие, как постоянная частота вращения у первого при различных нагрузках. Поэтому их применяют в приводах машин, требующих постоянных скоростей, например, в компрессорах, насосах или вентиляторах, поскольку они очень легки в управлении.
Классификация электродвигателей
Источник: https://electric-220.ru/news/sinkhronnyj_i_asinkhronnyj_dvigatel/2013-12-28-477
Синхронный и асинхронный электродвигатели: принципы работы и различия в характеристиках

Электродвигатели — машины, превращающие энергию электричества в механическую.
Преобразованная энергия приводит во вращательное движение ротор двигателя, передающий вращение через трансмиссию непосредственно на вал исполнительного механизма.
Основными типами электродвигателей являются синхронный и асинхронный двигатели. Различия между ними определяют возможности использования в различных устройствах и технологических процессах.
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле.
Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
Отличительные черты асинхронных двигателей
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками.
Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора.
Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
Отличие в характеристиках электродвигателей
Конструктивные особенности и рабочие характеристики электродвигателей имеют решающее значение при выборе агрегатов. От этого зависит проектирование трансмиссий и всех силовых узлов механизмов. При выборе двигателя нужно опираться на общность и главные отличия в свойствах машин:
- Главное отличие синхронного от асинхронного двигателя заключается в конструкции ротора. Он представляет собой постоянный или электрический магнит. У асинхронника магнитные поля в роторе наводятся с помощью электромагнитной индукции.
- У синхронных двигателей частота вращения вала постоянна, у асинхронников она может изменяться при изменении нагрузки.
- У синхронников отсутствует пусковой момент. Для входа в синхронизацию требуется применять асинхронный пуск.
Синхронный и асинхронный электродвигатели находят каждый своё применение.
Синхронные двигатели рекомендуется использовать везде при высоких мощностях, где присутствует непрерывный производственный процесс и не нужно часто перезапускать агрегаты или регулировать частоту вращения.
Они используются в конвейерах, прокатных станах, компрессорах, камнедробилках и т. д. Современный синхронный электродвигатель имеет такой же быстрый запуск, как и асинхронный, но он меньше и экономичнее, чем асинхронный, равный по мощности.
Асинхронные электродвигатели с фазным ротором применяются там, где нужен большой пусковой момент и частые остановки агрегатов. Например, в лифтах и башенных кранах. Асинхронные электродвигатели с короткозамкнутым ротором получили широкое применение из-за простоты устройства и удобства в эксплуатации.
Используя достоинства разных агрегатов и то, чем отличается синхронный двигатель от асинхронного, можно делать обоснованный выбор того или иного мотора при проектировании машин, станков и другого оборудования.
Источник: https://220v.guru/elementy-elektriki/dvigateli/sinhronnye-i-asinhronnye-dvigateli-ih-otlichiya-i-raznica-v-primenenii.html
Конструкционные отличия синхронного и асинхронного двигателя
Всем известно, что основное предназначение электродвигателей — это преобразование электрической энергии в энергию механическую. Это обнаружил аж в 1821 году Майкл Фарадей, который проводил опыты с магнитами и магнитным полем.
С тех пор прошло много времени, а электрические моторы заняли свое основное место в промышленности и быту. Без них сегодня никуда. В настоящее время производители электродвигателей предлагают большое количество моделей, различающихся по конструкции и принципу действия.
Это двигатели постоянного и переменного тока, синхронные и асинхронные. Нас сегодня интересует именно синхронный и асинхронный двигатель — отличия.
Чтобы разобраться в отличиях, необходимо рассмотреть конструктивные особенности каждого типа моторов и понять принцип их работы.
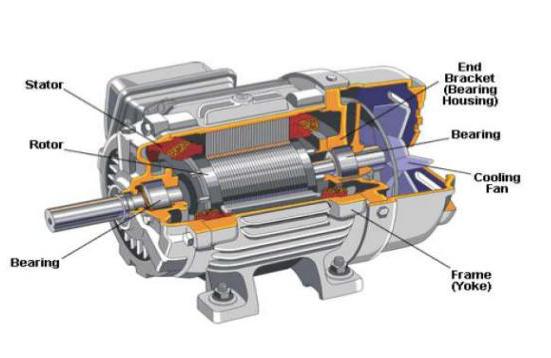
Асинхронный электродвигатель
Итак, надо начать с рассмотрения конструкции асинхронной модели. Основное отличие от синхронной — это наличие трех обмоток в статоре, концы которых выводятся для подключения в клеммную коробку. Вторая основная часть мотора — ротор цельного типа, торцы которого замыкаются между собой, отсюда, в принципе, и название — короткозамкнутый.
Дополнением конструкции является крыльчатка, с помощью которой охлаждается двигатель. Устанавливается крыльчатка на вал (ротор) электрического мотора.
Сам ротор держится и вращается в подшипниках, установленных в двух крышках корпуса. Обратите внимание, что именно подшипники и являются самым уязвимым местом агрегата.
Именно они чаще всего выходят из строя. Правда, заменить их не очень сложно.
Принцип работы
По какому принципу работает асинхронный двигатель? Внутри корпуса мотора, где расположены обмотки статора, возникает магнитное поле, которое действует на ротор, заставляя его вращаться под действием возникшей электродвижущей силы. Но вращение ротора может быть только в том случае, если скорость вращения магнитного поля будет быстрее вращения самого вала двигателя. Если скорости будут одинаковыми, то электродвижущая сила не появится.
Но в любом случае этого произойти не может, потому что здесь несколько причин, сдерживающих скорость вращения ротора.
- Трение в подшипниках.
- Нагрузка на сам вал.
Но самое главное, что магнитные полюса в асинхронном двигателе постоянно меняются, что влияет на смену направлений тока в статоре электродвигателя. То есть, в определенное время ток начинает вращаться «на нас», а в следующий промежуток «от нас». Именно поэтому такие двигатели называются асинхронными, у них просто нет стабильного направления тока.
Что касается скорости вращения ротора, то тут необходимо сделать одно замечание. Этот показатель будет зависеть от того, сколько полюсов одномоментно подключено к питанию. К примеру, максимальная скорость вращения вала будет при двух подключенных полюсах. Чтобы снизить данный показатель, необходимо добавить еще два полюса, то есть, увеличить их вдвое.
И еще один недостаток. Асинхронные двигатели при работе обладают разной скоростью вращения вала. К примеру, на холостом ходу это может быть одна величина, при нагрузке она резко снижается. По сути, получается так, что изменение частоты тока влияет на скорость вала. Другого способа изменить скорость вращения не существует.
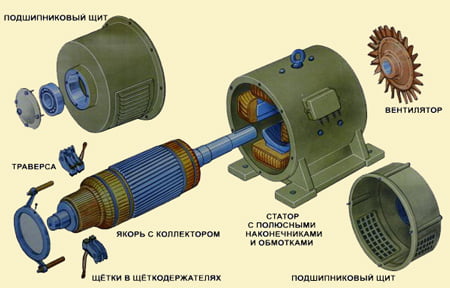
Синхронный электродвигатель
Итак, синхронный электродвигатель — это мотор с постоянной скоростью вращения ротора, плюс возможность регулировать эту скорость. Устройство синхронного мотора достаточно сложное. Чтобы в нем разобраться, необходимо рассмотреть фотографию ниже.
Здесь четко показано, что обмотки двигателя располагаются на якоре или роторе агрегата. Концы обмоток выведены и закреплены на токосъемное кольцо, а, точнее, к его секторам. Сам же ток подается на это же кольцо только через графитовые щетки, которые подключены к питающей сети.
У двигателя этой модели больше уязвимых мест, чем у асинхронной.
- Снашиваются графитные щетки.
- Плохой контакт между токосъемным кольцом и щетками за счет ослабления пружины, которая прижимает последние к кольцу (коллектору).
- Изнашиваются подшипники.
- Образование грязевого налета на поверхности токосъемного кольца.
Теперь переходим к другой позиции — принцип работы синхронного электродвигателя. Вращающийся момент внутри мотора образуется за счет взаимодействия магнитного поля, которое образуется в обмотках возбуждения, и тока, проходящего по якорю агрегата.
Но тут есть один момент — изменяющееся направление тока (переменного) будет менять и направление вращения магнитного поля двигателя. Правда, смена вращения будет меняться и в корпусе аппарата, и на якоре одновременно.
Вот почему вращение ротора мотора всегда происходит с одинаковой скоростью.
Именно поэтому изменить эту величину можно лишь тем, если изменить напряжение подаваемой на щетки электроэнергии. Вспомните пылесосы, где всасываемую мощность изменяют переключателем, который просто соединен с реостатом. А мощность пылесоса зависит от скорости вращения вала крыльчатки, то есть вала электродвигателя. Чем больше скорость, тем больше мощность всасывания.
Но синхронные электродвигатели в промышленности своего основного места не нашли. Здесь в основном используются асинхронные модели.
Какой лучше
Итак, в статье были разобраны устройство и принцип действия двух видов электродвигателей. Говорить о том, что какой-то из них лучше, нельзя. Но отметим, что асинхронные модели проще в конструктивном аспекте. Они надежнее в эксплуатации. Если их не перегружать, то срок службы может быть очень длительным.
К сожалению, синхронные виды этим похвастаться не могут. Графитовые щетки быстро изнашиваются, им требуется замена. Но если не уследить, и графит сотрется полностью, то металлические держатели щеток начнут истирать токосъемное кольцо.
А его выход из строя — это не только полный выход из строя двигателя, это большое количество искр (трение металла о металл) и возможность появления более серьезных неприятностей.
Источник: http://OnlineElektrik.ru/eoborudovanie/edvigateli/sinxronnyj-i-asinxronnyj-dvigatel-otlichiya-po-konstrukcii-i-principu-raboty.html
Асинхронные и синхронные двигатели
Чтобы производственные механизмы работали с максимальной эффективностью, необходимо правильно подобрать электрический двигатель, который будет применяться в качестве привода. В этой статье мы рассмотрим, чем отличаются асинхронные и синхронные двигатели с точки зрения конструктивных особенностей, функциональности и экономичности.
Асинхронные и синхронные двигатели: устройство
Электрические двигатели представляют собой агрегаты для преобразования электроэнергии в энергию механическую. Основу конструкции двигателя (как синхронного, так и асинхронного типа) составляют следующие элементы:
- неподвижный (статор);
- вращающийся (ротор).
Статоры электродвигателей обеих категорий имеют схожий принцип устройства. В специальные пазы (осевые прорези) уложены токонесущие проводки из меди или алюминия. Функцией статора является создание вращающегося магнитного поля. Ротор (с обмоткой возбуждения) закреплен на валу двигателя и вращается под воздействием возникающей электродвижущей силы.
В чем ключевое отличие синхронного двигателя от асинхронного
Главное отличие синхронного от асинхронного двигателя заключается в устройстве ротора.
Роторы синхронных двигателей представляют собой постоянные или электрические магниты. Постоянное магнитное поле, создаваемое ими, взаимодействует с вращающимся магнитным полем статора.
В случае с асинхронным двигателем (который также называют индукционным) в пазы ротора вставляются короткозамкнутые металлические пластины. Кроме короткозамкнутой разновидности, применяются также фазные роторы, снабженные контактными кольцами, которые после разбега замыкаются накоротко.
В результате соотношение частоты оборотов двигателя, находящегося под нагрузкой, с частотой вращения, которая присуща магнитному полю статора, для разных типов двигателя следующее:
- равное для агрегатов синхронного типа;
- неравное для асинхронных двигателей (наблюдается постоянное отставание от скорости вращения магнитного поля статора, равное величине скольжения).
На основе понимания того, чем отличается асинхронный двигатель от синхронного, можно сформулировать главные преимущества и недостатки этих двигателей.
Сравнение разных типов двигателей
Двигатели синхронной разновидности сложнее в использовании, поскольку они:
- в отличие от асинхронных моделей нуждаются в дополнительном источнике постоянного тока;
- подвержены более быстрому износу деталей (по причине использования контактных колец со щетками);
- требуют применения вспомогательных механизмов для запуска (индукционный двигатель имеет собственный пусковой момент).
Для асинхронных моделей характерны:
- простота конструкции;
- надежность в эксплуатации.
При этом синхронные двигатели обладают более широкими возможностями с точки зрения коэффициента мощности, а также менее чувствительны к перепадам напряжения, но стоимость таких агрегатов выше, что делает их использование менее выгодным.
Источник: https://www.szemo.ru/press-tsentr/article/asinkhronnye-i-sinkhronnye-dvigateli/
Синхронные электродвигатели. Работа и применение. Особенности

Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работы
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название — якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости.
Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя.
Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона.
Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем.
Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостатки
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки.
Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателя
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
• Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым.
А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред.
Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
• Особенности выполнения подключения электродвигателя с потребителем.
Синхронные компенсаторы
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях.
Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера применения
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора — от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Похожие темы:
Источник: https://electrosam.ru/glavnaja/jelektrooborudovanie/ustrojstva/sinkhronnye-elektrodvigateli/
Асинхронные и синхронные двигатели
 ⇐ ПредыдущаяСтр 17 из 18Следующая ⇒
⇐ ПредыдущаяСтр 17 из 18Следующая ⇒
Двигатели переменного тока (а.с. motor), как правило, применяются в тяжелых эксплуатационных условиях, однако они находят все большее распространение в системах промышленного управления, например в качестве сервомоторов. Некоторые преимущества двигателей переменного тока перечислены ниже:
экономичность;
надежная и простая конструкция;
высокая эксплуатационная надежность;
простое энергопитание;
отсутствие коммутатора;
практическое отсутствие дуговых явлений (поскольку нет коммутаторов).
Отрицательными чертами двигателей переменного тока являются более низкий момент начала движения, чем у двигателей постоянного тока, и более сложные цепи управления. Однако преимущества систем привода переменного тока таковы, что они успешно конкурируют с двигателями постоянного тока в роботах, манипуляторах и других промышленных системах силового привода.
Широкое применение двигателей переменного тока в качестве сервомоторов стало возможным по мере развития силовой электроники в сочетании с новыми методами управления. Применение микроэлектроники обеспечивает вполне приемлемое управление частотой питающего напряжения.
Вращающий момент двигателя нельзя измерить так же просто, как у двигателей постоянного тока, однако существуют способы его оперативной (on-line) оценки.
Из-за жестких временных требований для управления должны использоваться микропроцессоры со специальной архитектурой, обеспечивающей очень высокую скорость вычислений, — цифровые сигнальные процессоры (Digital Signal Processors — DSP).
У асинхронного (индукционного) двигателя магнитное поле статора не постоянно, в отличие от двигателя постоянного тока. В простейшей (двухполюсной) машине имеются три статорные обмотки, расположенные вокруг статора под углом 120° друг относительно друга.
Когда по ним подается трехфазное переменное напряжение, результирующий магнитный поток статора вращается с частотой приложенного наложения.
Поскольку к обмотке ротора не подводится никакого внешнего питания (она короткозамкнута), то нет необходимости в щеточных коммутирующих устройствах.
Вращающееся поле статора пересекает обмотки ротора и индуцирует в них ток. Результирующий поток ротора взаимодействует с вращающимся потоком статора и создает вращающий момент в направлении вращения поля статора. Этот момент и есть рабочий момент двигателя.
Из-за потерь на трение ротор не может даже на холостом ходу достичь так называемой синхронной частоты вращения, т. е. точного значения частоты вращения поля статора. Вращающий момент образуется именно из-за разности частот вращения ротора и поля статора.
Относительная разность частот вращения называется скольжением ротора (slip)
где ωs — частота вращения поля статора (синхронная частота), а ωm — частота вращеия ротора. Очевидно, что при s= 0 вращающий момент равен нулю.
Ротор синхронного двигателя движется синхронно с вращающимся магнитным полем, создаваемым обмотками статора (статор синхронного двигателя в принципе такой как у асинхронного). В отличие от асинхронного, обмотки ротора синхронного двигателя возбуждаются от внешнего источника постоянного тока.
Полюса возникающего магнитного поля ротора занимают фиксированное положение относительно вращающегося поля статора и вращаются вместе с ним; следовательно, скорости вращения ноля статора и ротора идентичны и скольжение равно нулю.
Синхронные двигатели часто используются в тех случаях, когда необходима постоянная скорость вращения при переменной нагрузке. В сочетании с современными преобразователями частоты синхронные двигатели могут работать с переменной скоростью вращения.
Большое распространение приобретают синхронные двигатели с постоянными магнитами. Шаговые двигатели можно рассматривать как специальный тип синхронного двигателя.
Управляющие клапаны
Управляющий клапан (control valve) состоит из тела клиновидной или цилиндрической формы (иногда называется тарелкой), закрепленного на стержне (штоке), который движется вверх и вниз относительно цилиндрического седла. Стержень обычно перемещается под давлением сжатого воздуха на поршень или диафрагму с пружиной.
Пружина может либо открывать, либо закрывать клапан в зависимости от того, какое положение требуется в случае прекращения подачи сжатого воздуха. Иногда для управления потоком используется электрический или гидравлический привод.
Конструкции тела и седла клапана различаются в зависимости от требований к соотношению между производительностью и потерями напора на клапане, типа жидкости и расхода при разных положениях штока.
Размер клапана обычно выбирают в соответствии с параметрами трубопровода, в котором он устанавливается. Выбор формы клапана и сочетания размеров седла и тела (тарелки) требует оценки следующих факторов.
Потери напора (pressure drop). Большие потери напора на клапане могут затруднить движение штока. Специальная конструкция клапана заставляет поток двигаться в противоположных направлениях через два запирающих элемента, тем самым уравновешивая силы. Необходимость снижения потерь напора может потребовать применения различных типов клапанов, например типа “бабочка” (butterfly valve).
Максимальный расход (maximum flowrate). Это требование сводится к сочетанию максимального расчетного расхода с максимальной зоной управления. Последняя должна в идеале составлять 30-50 % от расчетного расхода. Иногда неопытные специалисты задают эту величину на уровне 10 %, что заметно ухудшает рабочие характеристики.
Управляемость (rangeability). Это отношение расходов при двух различных положениях штока.
Оно в основном связано с конструкцией тела и седла и зависимости от потерь напора от расходных характеристик, которые, в свою очередь, связаны характеристиками нагнетающего насоса.
Управляемость должна обеспечивать номинальный диапазон расходов с соответствующими зонами управления (желательно 30-50 %) по обе стороны диапазона.
Чувствительность (sensitivity) связана с управляемостью и величиной управляющего воздействия, необходимого для управления с заданной точностью. Иногда большой клапан обеспечивает номинальный расход, а малый, установленный параллельно, обеспечивает необходимую чувствительность.
Линейность (linearity). Желательно, чтобы в контуре управления существовала линейная зависимость между выходами регулятора и датчика, т. е. в цепочке «клапан — процесс — датчик”.
Если контур управления не обладает линейной зависимостью выходных и входных величин, ее можно обеспечить выбором характеристик клапана, а иногда и датчика.
Качество управления при отсутствии линейности и может оказаться низким, или потребуется реализация специальных способов управления.
Гистерезис (hysteresis). Это обычная проблема управляющих клапанов, возникающая из-за процессов сухого трения (прилипания) в месте прилегания запорного элемента клапана к седлу, а также потерь напора на клапане.
Как правило, гистерезис является причиной небольших постоянных колебаний в контуре управления, для борьбы с которыми можно применять устройства точного позиционирования клапана. Это специальное устройство управления с большим коэффициентом усиления, которое обеспечивает нужное положение штока клапана.
В этом случае управляющий компьютер не осуществляет точного контроля за открытием клапана, а только вырабатывает опорные значения для устройства позиционирования клапана.
Рис. 9.2. Характеристики клапанов
Управляемость клапана можно определить на основании расчета двух расходов, равных, например, 15 и 85 % от максимального расхода. В этом случае необходим знать функцию f(х), которая характеризует клапан. Клапаны поставляются со следующими характеристиками:
f(х) = х — линейная,
f(х) = sqrt (x) — соответствующая квадратному корню,
f(x) — А↑(х-1) — равного процентного отношения (где конструктивная постоянная А обычно лежит в пределах от 20 до 50).
Эти зависимости показаны на рис. 9.2. Следует отметить, что идеальный клапан равного процентного отношения не закрывается полностью. На практике их проектируют таким образом, чтобы получить линейную характеристику при очень малых открытиях и следовательно, они закрываются полностью.
ОБЪЕКТЫ УПРАВЛЕНИЯ
Источник: https://lektsia.com/3×4715.html
В чем разница асинхронного и синхронного двигателей

Электродвигатели можно разделить на две основные категории — синхронные и асинхронные (индукционные) двигатели. Эти два вида довольно сильно отличаются друг от друга. Разница уже видна в самих названиях.
Отличить агрегаты можно по выбитому на шильдике количеству оборотов (если там не указан тип мотора), у ассинхронного мотора неокруглённое число (например, 950 об/мин), у синхронного округлённое (1000 об/мин).
Есть и другие важные различия, в этой статье мы рассмотрим наиболее показательные из них: конструктивные, рабочие и ценовые.
Различия в работе и стоимости
Любой двигатель состоит из двух элементов: неподвижного и вращающегося. Статор имеет осевые прорези — пазы, на дно которых укладываются токонесущие медные или алюминиевые проводки. У электродвигателя на валу крепится ротор с обмоткой возбуждения.
У синхронных моделей при малых мощностях они представляют собой постоянные магниты.
Переменное напряжение подаётся на обмотку статора, ротор подключается к постоянному источнику питания. Проходящий по обмотке возбуждения постоянный ток наводит магнитное поле статора. Крутящий момент создаётся из-за угла запаздывания между полями. Ротор имеет такую же скорость, как и магнитное поле статора.
Асинхронные модели — это достаточно недорогие двигатели, которые применяются часто и всюду. Они проще в конструктивном плане, несмотря на то, что неподвижные части в принципе у всех моторов похожи.
По обмотке статора пропускается переменный электроток, который взаимодействует с роторной обмоткой.
Два поля вращаются с одинаковой скоростью в одном направлении, но не могут быть равными, иначе бы не создавалась индуцированная ЭДС и, тем более крутящийся момент.
Это становится причиной возникновения индуцированного тока в обмотке роторе, направление которого согласно правилу Ленца таково, что он склонен противостоять причине своего производства, т. е. скорости скольжения.
Скорость вращения ротора не совпадает со скоростью магнитного поля, она всегда меньше. Таким образом, ротор пытается догнать скорость вращающегося магнитного поля и уменьшить относительную скорость.
Основные достоинства и недостатки
- Асинхронные агрегаты не требуют какого-либо дополнительного источника питания. Синхронным необходим дополнительный источник постоянного тока для подачи напряжения на обмотки.
- Синхронники обладают относительно невысокой чувствительностью к перепадам сетевого напряжения и стабильностью вращения вне зависимости от нагрузки.
- Индукционные двигатели не требуют наличия контактных колец, за исключением двигателей с фазным ротором, которые их имеют для плавного пуска или регулирования скорости. В синхронных двигателях больше уязвимых мест, так как используются контактные кольца со щетками.
Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.
- Синхронники нуждаются во вспомогательных пусковых механизмах, так как не обладают функцией самопуска. Для индукционных электродвигателей, имеющих собственные пусковые моменты, такой механизм не требуется.
Какой агрегат лучше
В заключение нужно отметить, что говорить, якобы один мотор лучше другого, нельзя. Однако, асинхронные модели надежнее в эксплуатации, отличаются простотой конструкции. Если агрегаты не перегружать, то их длительным сроком службы пользователь может остаться довольным.
Достоинством синхронной модели является то, что можно легко установить высокий коэффициент мощности. Поэтому модель является гораздо более эффективной, но по цене она будет соответственно дороже. Машины применяются в системах с требуемой мощностью 100 кВт и более.
Источник: http://ElectricDoma.ru/elektrodvigateli/raznitsa-asinhronnogo-i-sinhronnogo-dvigatelya/
В чём же отличия синхронного и асинхронного электродвигателей?

Отличия синхронного и асинхронного двигателей ясны из их названий. Ниже перечислены плюсы, которыми отличаются оба двигателя — синхронный и асинхронный. В синхронном типе этот показатель является постоянным, в отличие от асинхронного.
Поэтому первый используют там, где необходима постоянная скорость и полная управляемость, например, в насосах, вентиляторах и компрессорах. На короткое время принцип работы синхронного двигателя включает в себя и асинхронный режим, используемый для разгона до номинальной скорости вращения.
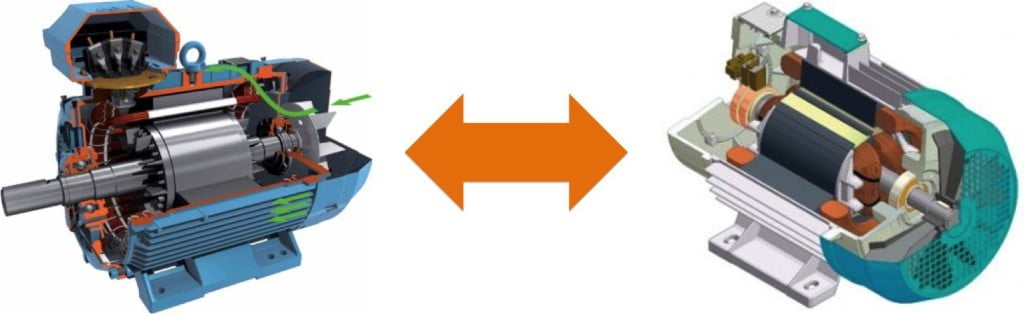
С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного.
Главное отличие синхронного двигателя от асинхронного заключается в соотношении величины частот вращения ротора и магнитного поля. В агрегате первого типа оба показателя одинаковые. В асинхронной машине — разные.
Основное отличие от синхронной — это наличие трех обмоток в статоре, концы которых выводятся для подключения в клеммную коробку. Вторая основная часть мотора — ротор цельного типа, торцы которого замыкаются между собой, отсюда, в принципе, и название — короткозамкнутый.
Последний у синхронного двигателя представляет собой магнит, выполненный (при относительно небольших мощностях) на базе постоянного магнита или на основе электромагнита. Недостатком асинхронных двигателей является трудность регулирования их частоты вращения.
Для реверсирования трехфазного асинхронного двигателя приходится изменять расположение двух фаз или двух линейных проводов, приближающихся к обмотке статора.
Для возможности работы на переменном токе применяется статор из магнитно-мягкого материала, имеющего малый гистерезис (сопротивление перемагничиванию).
На короткое время принцип работы синхронного двигателя включает в себя и асинхронный режим, используемый для разгона до номинальной скорости вращения. В это время индукторные обмотки замыкаются накоротко или посредством реостата.
В отличие от синхронного, это простой и дешевый двигатель, применяющийся повсеместно.
Итак, синхронный электродвигатель — это мотор с постоянной скоростью вращения ротора, плюс возможность регулировать эту скорость. Устройство синхронного мотора достаточно сложное.
Вращающийся момент внутри мотора образуется за счет взаимодействия магнитного поля, которое образуется в обмотках возбуждения, и тока, проходящего по якорю агрегата.
Но тут есть один момент — изменяющееся направление тока (переменного) будет менять и направление вращения магнитного поля двигателя.
В этом заключается принцип работы электродвигателя. Причём, примитивного синхронного электродвигателя! Главное же отличие заключается в устройстве роторов. Асинхронный двигатель состоит из статора цилиндрической формы и ротора.
Он работает на основе взаимодействия магнитного статорного поля и наводящихся этим же полем токов в роторе. Для того, чтобы синхронный двигатель работал сначала его ротор надо раскрутить до скорости магнитного поля статора.
Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой. Для этого, достаточно изменить место расположения двух линейных проводов или фаз, которые замыкаются на обмотку статора.
Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. В рабочих режимах разница частот вращения статора и ротора не велика и составляет несколько процентов.
Основным недостатком асинхронных двигателей является трудность регулировки частоты вращения. Трехфазные асинхронные двигатели могут быть легко реверсированы, то есть вращение двигателя может измениться на противоположное направление. От ДПТ их отличает простота конструкции, надежность, высокие технико-экономические показатели.
А вот асинхронные электродвигатели снижают частоту вращения при увеличении нагрузки. Единственный недостаток этих агрегатов заключается в достаточной трудности регулировки частоты их вращения. В этой статье мы рассмотрим, чем отличаются асинхронные и синхронные двигатели с точки зрения конструктивных особенностей, функциональности и экономичности.
Изменения тока возбуждения позволяет регулировать в них нагрузку.
Данный вид устройста представляет механизм, направленный на трансформацию электрической энергии переменного тока в механическую.
Из самого названия «асинхронный» можно сделать вывод, что речь идет о неодновременном процессе. В синхронном типе этот показатель является постоянным, в отличие от асинхронного.
У синхронного типа он заключается в постоянном или электрическом магните, асинхронные двигатели короткозамкнутые.
Источник: http://membeduet.ru/V-chyom-zhe-otlichiya-sinkhronnogo-i-asinkhro/



